人形机器人如何由表演走向实用 从舞台到车间的漫长路
2026年的央视春晚上,一台人形机器人在舞台上完成从盘核桃到空翻的动作,观众的掌声如潮水般涌来。站在灯光下,我脑海中突然冒出一个问题:这场看似近乎魔法的展示背后究竟隐藏了多少看不见的成本。每一个流畅的动作都像是铰链发声的金属乐章,光鲜背后是无数工程师夜以继日的努力。如果我们只盯着表演,是否会忽略了让机器人真正在车间里“干活”的那段漫长路?

学习流程看起来像一份繁琐的教学记录。训练师通过手柄、VR和数据采集服逐步教机器人拿杯子、传递物品,同时收集关节角度、触觉反馈和环境视觉等多模态数据。接着进行数据清洗标注,筛选原始数据,逐帧把动作翻译成机器人能懂的语言。然后进入模型适配阶段,让系统从“教会”到“自主执行”迈出第一步。最后,在真机上反复调试,修正卡顿、力度不对和定位偏差等问题。
要让一个动作真正学会,往往需要千小时的数据积累,而一名训练师每天工作8小时,最终用于训练的有效数据只有2到3小时。更让人揪心的是,走向通用化的路上,泛化能力成了最大的拦路虎。模型在教会它端起水杯时,未必就能适配不同尺寸、重量的杯子,遇到场景的小切换就要重新开始整轮训练。这似乎把“通用”变成了产业泡沫的遮眼布。

一种路线是视频模仿学习,号称“看一遍就会”,通过让机器人观看海量视频来学习动作,基本可以用视觉替代遥操作数据。支持者认为网上有无数的人类动作视频,神经网络能直接解析动作逻辑,训练周期从天降到小时。反对者则指出视频是二维的,缺少力和触觉反馈,机器人在实际物理交互中容易捉襟见肘。一旦遇到视频里没出现过的光线、材质或阻力变化,视觉-only的方案可能失效。

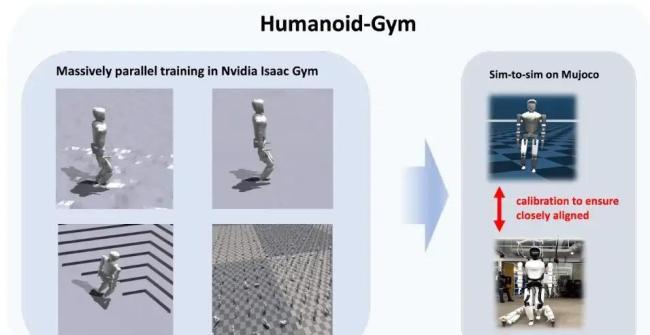
另一种路线是高保真仿真与虚实迁移,核心是在虚拟世界里构建高保真场景,让机器人进行亿万次试错后再落地真实世界。支持者认为虚拟没有物理损耗,可以并行运行成千上万个体,覆盖更多场景,显著提升训练效率。但虚实鸿沟一直存在,哪怕仿真再逼真,摩擦、布料、线缆缠绕、光影折射等微小差异会让模型在真实世界里表现完全不同。有人担心,仿真场景的满分在现实中会变成生活自理的“巨婴”。
还有一种路线是小样本强化学习,试图用极少数据让机器人学会如何举一反三。支持者称这是一场算法的胜利,实例中仅需少量示范就能完成桌面整理、叠衣等任务,迭代速度极快。但在真实场景中,泛化能力往往不堪一击,局部最优和投机取巧的动作成为隐患。这类算法对硬件资源依赖极大,GPU集群成本高,最终可能变成头部玩家的内卷。
业内似乎在追求一种混合训练,将视频模仿、仿真迁移和真机校准三者叠加,形成互补。有人甚至提出零样本迁移的设想,希望彻底解决成本与数据的矛盾。但问题也随之而来:各厂商在数据、仿真、算法上构筑自己的壁垒,难以互相兼容。如果数据和技术成为“只在强者之间流通”的私有资产,具身智能会不会最终演变成一座座孤岛?我们看到的流畅动作究竟是预设脚本的结果,还是智能涌现的初步证据?当数亿投入、数亿GPU照亮舞台,企业希望它们能走进工厂和家庭,但现实可能更像是一场漫长的耐心测试。答案在于构建可验证、可复用的学习体系,让机器人真的学会在开放世界里干活。
猜你喜欢
2026年2月24日最全新闻简报
2026年2月24日星期二农历正月初八1.商务部:中方敦促美方取消对贸易伙伴加征的有关单边关税措施。2.2026年春节档总票房突破56亿元,总场次超435万场创纪录。3.国内油价将于今日24时上调,92号汽油或重返“7元时代”。4.新疆巴音郭楞州尉犁县2月23日12时12分发生5
这几种肉这样吃!年夜饭照着做,健康美味全都有
今天(2月16日)是除夕不少家庭一早就开始张罗团圆饭一桌好菜,从挑对食材开始猪牛羊肉,谁是“营养冠军”?哪些肉类不建议多吃?吃不完的饭菜,怎么保存才安全?年夜饭前,快码住选对肉年夜饭更健康、更美味这顿团圆饭,不仅关乎口味,更关乎一家老小的健康。今年这样...
2026年2月4日新闻简报
2026年2月4日星期三农历腊月十七立春1、今年春运流向呈现“双向奔赴”,长辈进城“反向过年”与“南北互换”共热,或出现多个出行高峰;2、新规:网红达人禁止直播带货药品、保健食品、特殊医学用途配方食品、医疗器械;3、上海开始试点:官方收购二手房用于保租房,精准对...
Seedance 2.0是什么,为什么这么厉害
Seedance2.0是字节跳动在2026年2月发布的新一代AI视频生成模型。它能通过一句文字描述或一张图片,自动生成包含多个镜头、配乐和音效的短视频,部分效果已达到接近专业短片的水准。Seedance2.0的技术突破它之所以被认为是重大突破,主要在于解决了以往AI视频制作的几.
全球首个智能驾驶实验室建成
全球首个“三位一体”智能驾驶实验室昨天在重庆建成并投入使用。所谓三位一体是将“整车——动态交通——模拟气候”三个要素融合在这个超过5000平方米的实验室。这个实验室能够模拟大雾、暴雨等真实极端交通环境,可以实现全天候大规模的汽车智能化测试。在模拟大雾的自然环...

相关推荐
张仪从“嘴炮王者”到“大秦第一国相”,靠的是什么暗黑手册
都说张仪凭三寸不烂之舌搅动天下风云。但这位“大忽悠鼻祖”究竟学了什么,才能把一整个时代“骗”得团团转?答案其实很纯粹:他没读过太多别的,只凭一套秘籍,把对手的心思“算”到了骨子里。张仪从“嘴炮王者”到“大秦第一国相”,靠的竟是这本千古“暗黑操作手册”……一个靠“...
朱元璋为什么就是不传位给朱棣?
1398年,朱元璋驾崩,皇太孙朱允炆即位。四年后,他的四叔燕王朱棣起兵“靖难”,攻破南京,建文帝不知所踪。后人扼腕:如果当年朱元璋直接把皇位传给朱棣,哪还有四年内战?朱棣军事天才、政治手腕、杀伐果断,哪一样不比那个书呆子朱允炆强?朱元璋不是瞎子。他比任...
500块启动,闲鱼无货源能赚到钱吗?附多个零成本小妙招
《500块启动,闲鱼无货源能赚到钱吗?附多个零成本小妙招》很多人被“一部手机、不用囤货、月入过万”的宣传吸引,想拿500块去闲鱼试试无货源。真实结果到底怎样?我结合大量案例,给你一个不含滤镜的答案,顺便分享几个更稳妥的小本赚钱思路。一、闲鱼无货源的“冰与火...